 Manual home
Send Feedback
Manual home
Send Feedback
 Print
Print
|
|
|
|
|
Service
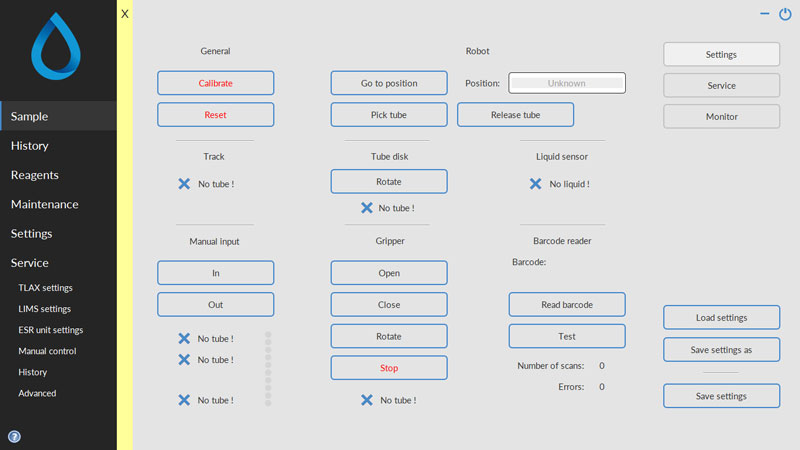
General:
Calibrate
To calibrate all or one specific position of the robot arm.
Reset
All positions of the robot arm will be checked.
Robot
Manual control of the robot arm and robot gripper movement.
Choose location and press Go to position, the robot arm moves to the chosen location. With the options Pick tube, Go to Position and Release tube a sample tube can be placed manually from one position to another. This can also be used to check a calibrated position.
Track
Shows if a tube is detected on the "Track" position.
Tube disk
Shows if a tube is detected. The tube disk can be rotated manually.
Liquid sensor
Shows liquid detection in the needle valve tube.
Manual input
The manual input adapter can be moved in and out.
Gripper
To check the functioning of the gripper with "Open" and "Close".
Barcode reader:
After pressing Read barcode the barcode is shown above the button if a tube is positioned on barcode reading position (and label is in readable position)
On this screen is also presence of tubes on: Track, Tube disk, Rack input or Gripper position are shown.
In This Section |
See Also |
Mechatronics home
Send Feedback
Print
|
Page last reviewed: 18/01/2018 16:15:57 (Version: MRN--EN) ©2019 RR Mechatronics |